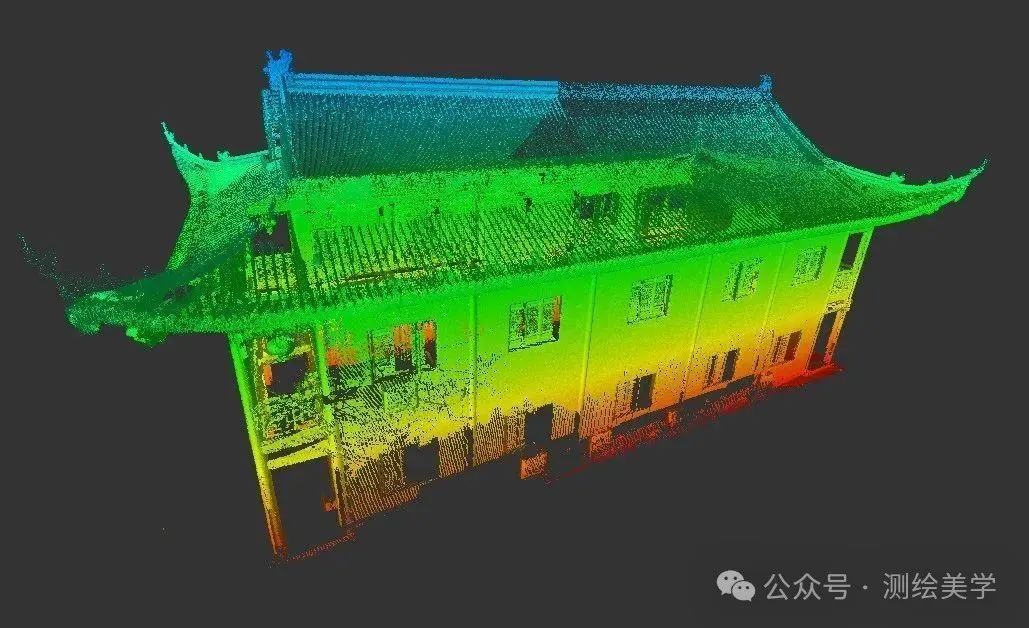
三维激光扫描技术是一种通过非接触式测量获取物体表面高精度三维数据的方法,其核心原理基于激光测距与空间角度定位的结合,最终生成密集的“点云”数据并重建三维模型。以下从核心技术原理、数据处理流程、系统组成及技术优势四个方面展开分析:

⚙️ 一、核心工作原理
激光测距原理
- 脉冲测距法:通过测量激光脉冲从发射到返回的时间差(Time of Flight, TOF),结合光速(c = 3×10⁸ m/s)计算距离:距离 = (c × 时间差) / 2,适用于远距离测量(如地形测绘)。
- 相位测距法:通过比较发射与接收激光的相位差计算距离,精度更高(毫米级),但有效距离较短,常用于工业检测。
- 三角测距法:利用激光发射点、物体反射点及接收器构成的三角形几何关系(已知基线长度和角度)计算距离,适用于近距离高精度扫描(如文物数字化)。
角度定位原理
- 旋转编码器:扫描仪内置高精度编码器,实时记录激光束的水平角(α)和垂直角(β),确定激光的空间指向。
- 惯性导航系统:通过陀螺仪和加速度计动态跟踪扫描仪姿态,提升移动扫描的定位精度(如车载扫描)。
三维坐标计算
结合测距结果(斜距 S)与角度数据(α, β),通过极坐标转换生成目标点的三维坐标:- X = S × cosβ × cosα
- Y = S × cosβ × sinα
- Z = S × sinβ
最终形成包含位置、反射强度、纹理信息的点云数据。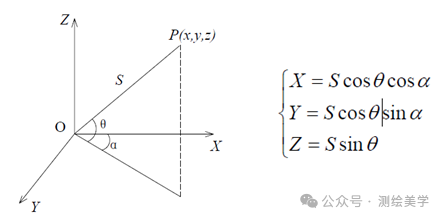
🔄 二、数据处理流程
数据采集
- 激光束以固定角度间隔(如0.001°)扫描物体表面,每秒可捕获数万至百万个点,形成原始点云。
- 影响因素包括激光频率、探测器灵敏度、环境光干扰等。
预处理
- 去噪:滤除由移动物体(如行人、车辆)或环境干扰引起的异常点。
- 配准:将多站点扫描数据通过公共点(如标靶球)或特征匹配统一到同一坐标系。
- 压缩:减少冗余数据,提升处理效率(如保留特征点,抽稀平坦区域)。
三维重建
- 点云建模:直接利用点云表达物体表面形态,适用于地形测绘。
- 表面重建:通过三角网格化(如Delaunay三角剖分)或曲面拟合生成连续表面模型。
- 纹理映射:将采集的影像色彩映射到模型表面,增强真实感。
后处理
- 模型优化(平滑孔洞、修复畸变)、几何参数分析(尺寸、体积)、输出标准化格式(如OBJ、STL)。
🛠️ 三、系统硬件组成
| 组件 | 功能 | 关键技术 |
|---|---|---|
| 激光器 | 发射高稳定激光束(脉冲/连续波) | 波长选择(红外/可见光)、功率控制 |
| 扫描镜 | 反射激光束并控制扫描方向(旋转/摆动) | 微电机驱动、角度控制精度(±0.001°) |
| 探测器 | 接收反射光信号并转换为电信号 | 光电二极管/CCD、高动态范围(HDR) |
| 控制电路 | 协调各部件工作、同步时间戳、数据预处理 | FPGA实时处理、多传感器融合 |
| 辅助系统 | 高分辨率相机(纹理采集)、惯性导航(移动定位) | 时间同步、空间标定 |
⚡ 四、技术优势与挑战
优势:
✅ 高精度:毫米级分辨率,适合微细结构测量(如文物裂纹)。
✅ 高效率:每秒数万点采集速度,比传统测量快10倍以上。
✅ 非接触:适用于危险环境(高温、高压)或脆弱物体(古迹、艺术品)。
✅ 全面性:全覆盖扫描,无视角盲区。挑战:
⚠️ 高成本:高端设备价格昂贵(如Trimble X7扫描仪)。
⚠️ 复杂数据处理:点云处理需专业软件(如ContextCapture)及高性能计算。
⚠️ 环境限制:强光、雨雾、镜面反射表面可能导致数据缺失。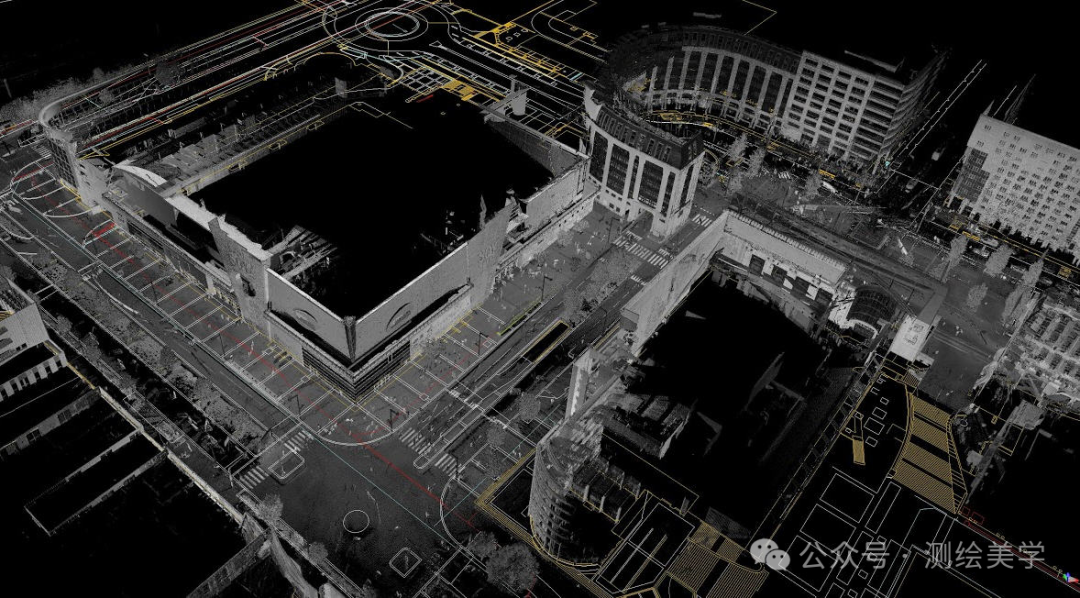
🏭 五、典型应用场景
- 文化遗产保护:敦煌壁画、古建筑的高精度数字化存档与虚拟复原。
- 工业检测:零部件尺寸公差分析、生产线实时监控(如汽车制造)。
- 地形测绘:生成数字高程模型(DEM)、监测地质灾害(滑坡、沉降)。
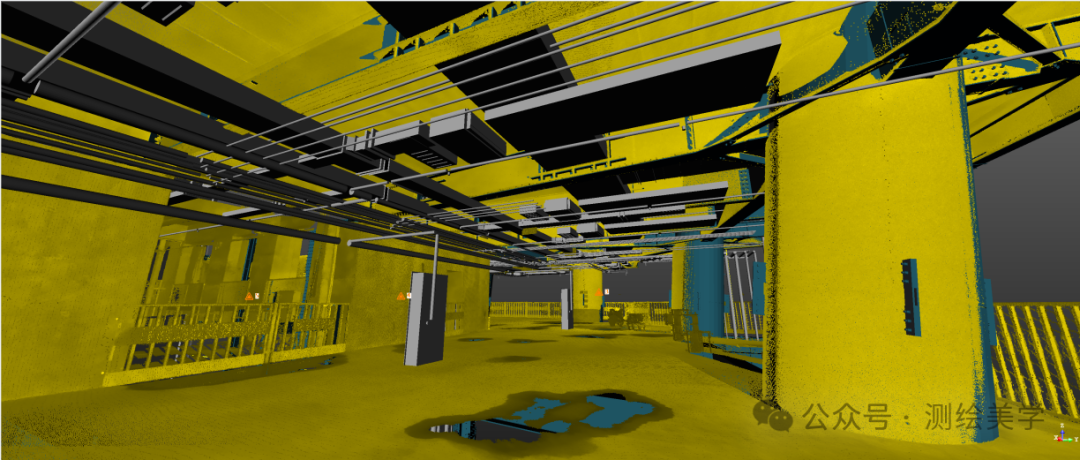
- 城市规划:建筑立面测量、地下管网三维建模。
三维激光扫描技术通过融合光、机、电三大系统,实现了从物理世界到数字空间的精准映射,为各领域提供了革命性的三维解决方案。随着硬件成本降低和AI算法的引入,其应用深度与效率将持续提升。
发表评论 取消回复